

Object Tracking with Raspberry Pi using OpenCV, Python
₹11,000.00 Exc Tax
Robot Tracking Moving Colour Obiects using Raspberry Pi with OpenCV
Platform : Python
Delivery Duration : 3-4 working Days
100 in stock
Description
ABSTRACT
Object tracking in real time is one of the most important topics in the field of computer Vision. Detection and tracking of moving objects in the video scenes is the first relevant step in the information extraction in many computer vision applications. This idea can be used for the surveillance purpose, video annotation, traffic monitoring, human-computer interaction, intelligent transportation, and robotics and also in the field of medical.
The robot is designed to track objects by spinning left and right to keep the object in sight and driving forward and backward to maintain a constant distance between the robot and the object. Images are acquired through the camera of an ARM11 Raspberry Pi device which is attached to the robot. The camera is attached to servos on the robot which allow the camera to pan and tilt. Several image processing techniques are used to detect the location of the object being tracked in the images
EXISTING SYSTEM
- Wireless camera and several sensors are used to trace the object and tracking.
DISADVANTAGES
- This type of tracking system is difficult to handle when the target objects change their appearance and shading conditions
PROPOSED SYSTEM
- Our proposed approach for object detection and tracking is based on colors of the object with the help of camera alone.
ADVANTAGES
- This method is used for tracking the various objects which have different shapes, sizes and colors.
- Avoiding technology employed several infrared rays’ sensors and supersonic waves’ sensors together and measures the range in real time between the objects and the robot.
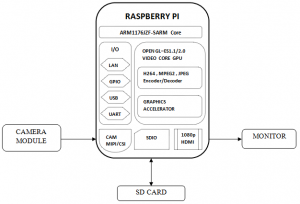
BLOCK DIAGRAM
![]()
BLOCK DIAGRAM EXPLANATION
This method was implemented in Open CV for windows and experimentation has been performed on the robot that uses a Raspberry Pi and camera to record and process the frames. The robot can track any fully colour object using the colour based tracking algorithm at an average frame rate of 25 frames per second, which is sufficient for real-time applications. Figure 1 shows a sequence of frames while the robot is tracking a green ball. Figure 2 shows a sequence of frames while the robot is tracking a blue ball.
Figure 1
![]()
![]()
Figure 2
![]()
HARDWARE REQUIREMENTS
- ARM11 Raspberry Pi board.
- Camera.
- Robot.
SOFTWARE REQUIREMENTS
- Linux
- OpenCV
APPLICATIONS
- Surveillance Applications.
- Robotics Applications.
- Industrial Applications.
Related products
-
-
Add to cart

- OpenCV Projects, Projects
Motion Detection using OpenCV – Python
- ₹8,500.00 Exc Tax
-

-

-
Reviews
There are no reviews yet.