

A self-balancing robot using Raspberry Pi
Call for Price
A self-balancing robot using Raspberry Pi
Description
ABSTRACT
There are plenty of ideas which is implemented in Robotics, In this Raspberry Pi beginner project, you will learn to make an autonomous self-balancing robot which will be balancing itself with Two wheels. This is one of Raspberry Pi fun projects, to make the car as self-balanced, using stepper motor so that to have the control over balance by step count based on the centroid. The centroid can be identified by interfacing GYRO sensor in the mid part of the car. So that based on the tilt detection car gets balanced.
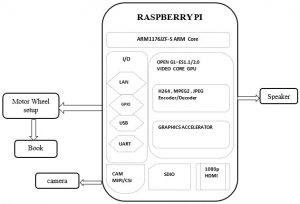
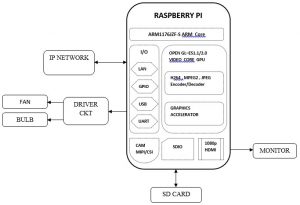
BLOCK DIAGRAM

BLOCK DIAGRAM DESCRIPTION
In the above block diagram, Raspberry Pi acts as a centralized system, which the car using Servo motors, so that balancing can be performed easily when compared to dc motors. Then Gyro sensor is placed on Car mid angle, which is interfaced with the Raspberry Pi through MCP3008 (ADC)
PROJECT DESCRIPTION
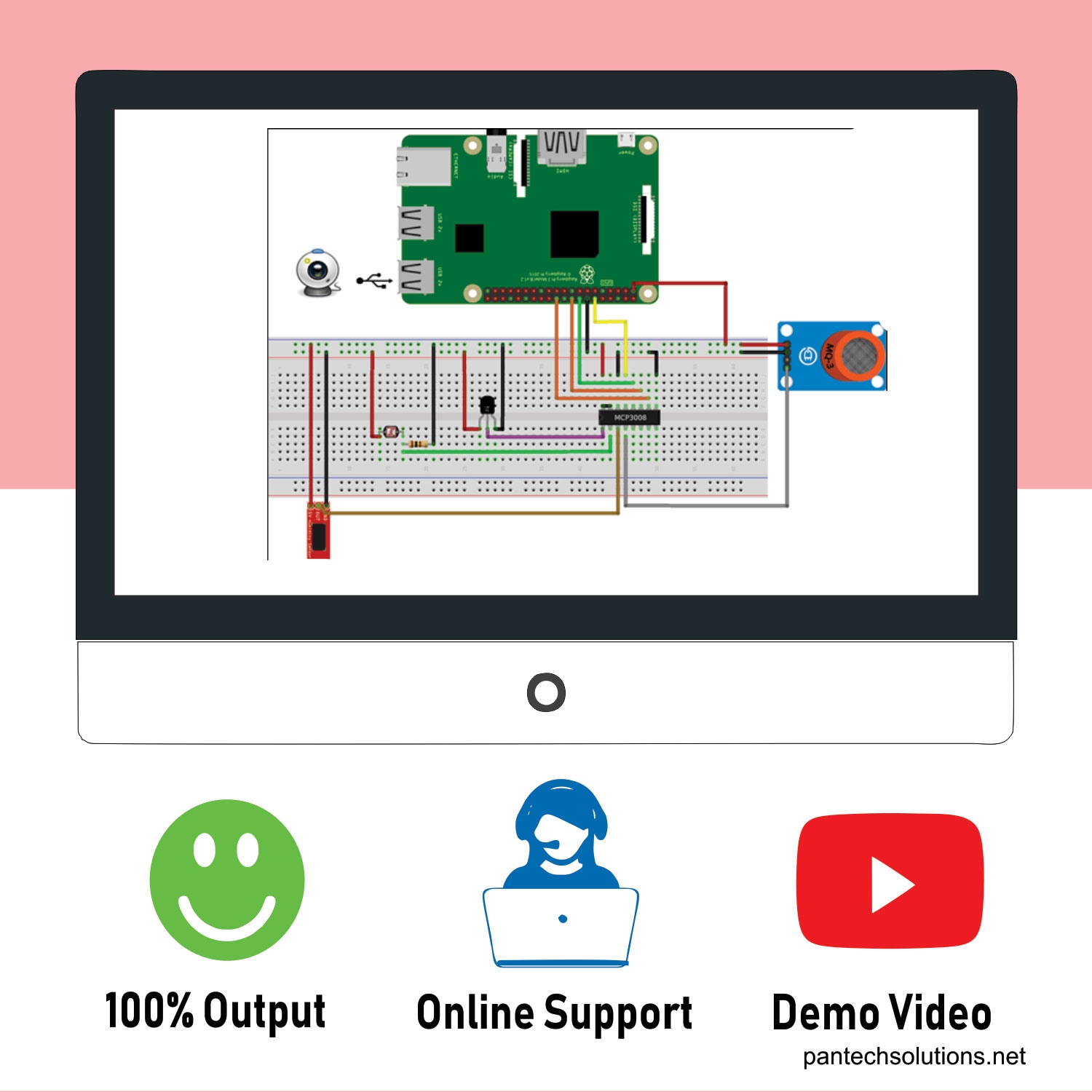
The Gyroscope sensor placed in the mid position of the Car, so that it gets read by the Raspberry Pi, using Analog to digital converter. Based on the sensor values which resulting 4 angle values, stepper motor step can be adjusted to make the balance on the car.
HARDWARE REQUIRED
- Raspberry Pi
- Power Adapter
- HDMI to VGA converter (optional, when connecting to Monitor)
- MCP3008 (ADC IC)
- L293D (Driver IC)
- 2- Stepper motor
- Car chassis
- Gyro sensor
SOFTWARE REQUIRED
- Raspbian OS
- SD Card Formatter
- Win32 Disk Imager (or) Etcher
LIBRARIES USED
- RPi.GPIO as GPIO (To access GPIO Pins of Raspberry Pi)
- Time library (For Delay functions)
CONCLUSION
By using the Gyro sensor, we get accurate value when compared to the MEMS sensor, then Stepper motor is highly controllable when we taking on balancing applications.
Additional information
| Weight | 0.000000 kg |
|---|
Reviews
There are no reviews yet.