


Object Identification and navigation for blind people using Kinect sensor
Call for Price
Object Identification and navigation for blind people using Kinect sensor
Description
This project presents a novel approach for detecting and classifying 3D objects by using the generalized the Kinect sensor. In our project considers feature points and color spectra as two interleaved processes to cooperatively recognize objects in a 2.5D fashion. With this strategy, the algorithm automates the image pre-processing operations regardless of scenes (i.e., particle cleaning, hole filling, particle eroding, and object dilating) and reduces the processing load over the sensor's point cloud for 3D object classification. Extensive experiments applied – but not limited – to recognition between different and similar objects, occlusion, and perspective change analyzing fitness and processing time show that the 2.5D approach makes feasible 3D object recognition for applications with video information.
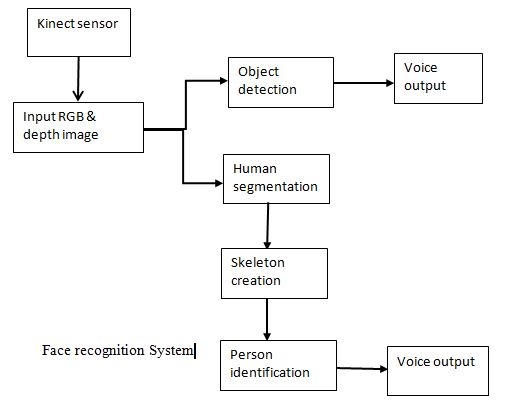
BLOCK DIAGRAM
Additional information
| Weight | 1.000000 kg |
|---|
Reviews
There are no reviews yet.