






Obstacle Avoidance Robot
Call for Price
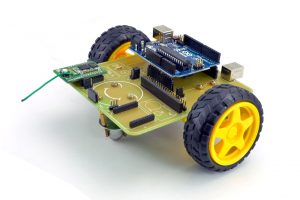
Obstacle Avoidance robot is one which can avoid an obstacle by using ultrasound sensor and navigate in its own path.
Shipping : 4 to 5 days from the date of purchase
Warranty : 3 Months
Description
Specifications of obstacle avoidance robot
- Ultrasonic sensor based obstacle detection
- SDM-IO Ultrasonic sensor used for range detection
- Range between obstacle and sensor is 20 cm.
- Automatic moving system
- Arduino based Robot car
- On board motor driver
- Two no’s of motor wheel and single motor less wheel
- Battery operated robot car
- Four no’s of AA Battery (+6V)
Additional information
| Weight | 1.000000 kg |
|---|




Reviews
There are no reviews yet.