


Color Based Object Detection using OpenCV, Python
₹5,000.00 Exc Tax
Color Based Object Detection using Python – OpenCV
Platform : Python
Delivery Duration : 3-4 working Days
100 in stock
Description
OBJECTIVE
This approach is based on the application of a colour based object detection technique, a method for HSV, and the key points matching technique.
ABSTRACT
We propose a novel and robust color object detection and localization algorithm. Without a priori information about the number of objects, our method can detect all the objects with similar color feature in template. An SIFT and key points matching algorithm is used to find the object candidate regions. The weighted histogram intersection is used to verify the presence of objects. With the color feature in template, our method can detect and locate the objects accurately, get the number of objects, estimate their scales and orientations. Our experimental results on outdoor images obtained under different environments verify the effectiveness of our algorithm
EXISTING SYSTEM
Existing system is based on the color joint probability function, in this it will look for the centroid of the colors and color edge co-occurrence histogram, so that the accuracy of this system will less.
PROPOSED SYSTEM
Here we are going to use the HSV for the color conversion, scale invariant feature transform for the feature extraction in the image and based on the key points matching the color object is identified.
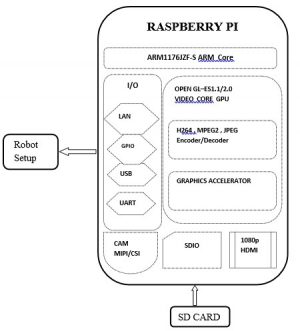
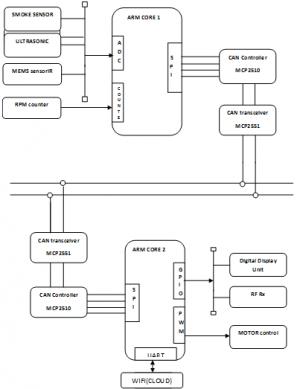
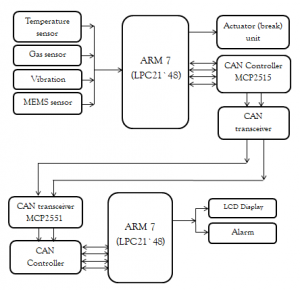
BLOCK DIAGRAM

ADVANTAGES
- Better accuracy in segmentation under various illuminations
- Less time consuming process
- It is less sensitive to background noise
APPLICATIONS
- People counting
- Vehicle detection
- Manufacturing industry applications
- Tracking objects
SOFTWARE REQUIREMENTS
- Python
- Opencv
- Numpy
RESULT
- Thus the color based object is detected by this proposed system. And in future the object can be tracked by the same method.
REFERENCES
[1] K. Lai, L. Bo, X. Ren, D. Fox, “A large-scale hierarchical multi-view RGB-D object dataset,” IEEE International Conference on Robotics and Automation (ICRA), pp. 1817-1824, 2011.
[2] GoogleTM , “Glass,” Internet: www.google.com/glass/, Jul. 15, 2013
[3] PrimeSenseTM , “Capri 1.25,” Internet: www.primesense.com/tag/capri-1- 25/, Jul. 15, 2013
[4] RaduBogdanRusu and Steve Cousins, “3D is here: Point Cloud Library (PCL),” IEEE ICRA, Shanghai, China, May 9-13, 2011.
[5] S. Hinterstoisser, S. Holzer, C. Cagniart,S. Ilic, K. Konolige, N. Navab, V. Lepetit, “Multimodal templates for real-time detection of textureless objects in heavily cluttered scenes,” Computer Vision (ICCV), IEEE International Conference on, pp. 858-865, 2011.
[6] A. Trevor, S. Gedikli, R. Rusu, H. Christensen, “Efficient Organized Point Cloud Segmentation with Connected Components,” 3rd Workshop on Semantic Perception Mapping and Exploration (SPME), Karlsruhe, Germany. May, 2013.

Reviews
There are no reviews yet.