


A CAN Protocol Based Embedded System To Avoid Rear-End Collision Of Vehicles
Call for Price
A CAN Protocol Based Embedded System To Avoid Rear-End Collision Of Vehicles
Description
Abstract:
The main object of the development to avoid the Collision warning is emerging automotive safety technologies that assist drivers in avoiding rear-end collisions. The function is to permit the driving force enough time to avoid the crash and yet avoid annoying the driving force with alerts perceived as occurring too early or unnecessary. The aim of this paper was to research the driving force’s behavior so as to define effective driver assistance systems that will be readily accepted by the driver. Four different driving traffic conditions were implemented. The info recorded during the tests was analyzed to assess the security distances required by the driving force during a car-following situation. In this, we have used the sensor to sense the temperature, gas, vibration, and axis of the vehicle, and then the information is transmitted to the receiver through can protocol if there are any abnormal conditions the breaking unit will initiating on the time. So here we are avoiding road accidents using this development.
Introduction:
In most rear-end collision accidents that happen in India, a shunt occurs when a vehicle crashes into the one ahead of it. The common factors contributing to rear-end collisions include driver inattention or distraction, tailgating, panic stops, and reduced traction due to wet weather or worn pavement. The Indian says that over 1.51 lakh people died in road accidents. Consistent with the National Highway Safety Administration, rear-end collisions account for less than 6% of fatal automobile crashes. However, they account for 28% of all automobile accidents, making them one of the foremost frequent sorts of automobile accidents within India. To avoid the rear-end collision accident we developed the can controller-based Rear-End Collision Avoiding based on can protocol using the embedded system in Vehicles. In this, we have used the sensor to sense the temperature, gas, vibration, and axis of the vehicle, and then the information is transmitted to the receiver through can protocol if there are any abnormal conditions the breaking unit will initiating on the time. So here we are avoiding road accidents using this development.
Existing System:
- Manual operation
- Monitoring depends on the driver
- Less Alert system
- Unsafe for others
Proposed System:
- Along with ARM controller to monitor and diagnose the problems in the vehicle.
Advantages:
- Automatic operation
- Safety concerns for others
- Continuously monitor with sensors
- High alert system
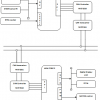
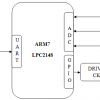
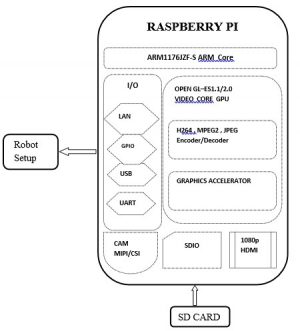
Block Diagram:

Block Diagram explanation:
The system consists of a microcontroller, CAN controller, and parameters of the vehicle. The microcontroller is the key element in the processing module which keeps on monitors the vehicle parameters. In the vehicle temperature sensor, MEMS sensor and are connected to monitor the physical parameter of the vehicle. CAN controller is used to communicating between the wind turbine and the database. For every particular amount of time, the microcontroller pre-processes sensed data and it will update the parameter values to the central database. RS232 cable is used for serial communication between the PC and the microcontroller. CAN interface module is used to communicate the monitored parameters between the vehicle and the control center. The CAN interface module consists of three components CAN Transceiver (MCP 2551), CAN Controller (MCP 2515). CAN transceiver is used to shift the voltage levels of the microcontroller to those appropriate for the CAN bus.
Hardware:
- ARM LPC2148
- MEMS Accelerometer
- Vibration
- Temperature sensor
- Gas sensor
- CAN controller MCP2515
- CAN transceiver MCP2551
- LCD Display
- Buzzer
- Breaking unit
Software:
- Compiler(KEIL IDE)
- Orcad design
- Programmers(Flash Magic)
- Languages: Embedded C
Applications:
- Electrical applications
- Industrial applications
- RTOS applications
Additional information
| Weight | 1.000000 kg |
|---|
Related products
-
- Out of StockRead more

- FPGA Projects, Projects
Bluetooth based RC car control using Spartan3an FPGA Project Kit
- Call for Price
-

-
Reviews
There are no reviews yet.