
Tracking Limb Motion Using A Wireless Network Of Inertial Measurement Units(IMU)
Call for Price
Tracking Limb Motion Using A Wireless Network Of Inertial Measurement Units(IMU)
Description
Abstract :
This 9 Degrees of Freedom (DOF) Inertial Measurement Unit (IMU) is used for tracking and sensing motion of any platform and is an ideal sensor system for motion control of aerial autonomous systems like multi-rotors, model airplanes, helicopters etc, and other systems that require to control the pitch, roll and yaw. The 9DOF Razor IMU incorporates three sensors – an ITG-3200 (MEMS triple-axis gyro), ADXL345 (triple-axis accelerometer), and HMC5883L (triple-axis magnetometer) – to give nine degrees of inertial measurement.
This paper presents the development of a low cost wireless real-time inertial limb tracking system for virtual training. The system is designed to provide highly accurate human body motion capture and interactive three-dimensional by combining low cost MEMS inertial measurement units (IMUs). First, MEMS IMU sensors are placed on user’s body and limbs according to human skeletal action, and each sensor performs a 9 degrees of freedom (DOF) tracking at a high-speed update rate. Second, the collected sensors’ data transferring through Microcontroller, The inner communication between the MCU and the IMU is I2C.Finally The IMU sensor values is serial communicated with Mat lab based PC Program for Motion detection.
Existing System :
- Difficult to obtain a complete outline of moving object.
- Frame Separation Method
- Large quantity of calculation, sensitivity to noise.
Proposed System :
- Advanced gradient decent algorithm provides very accurate and stable orientation estimation during the tracking process.
- Low power consumption and small compact size
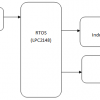
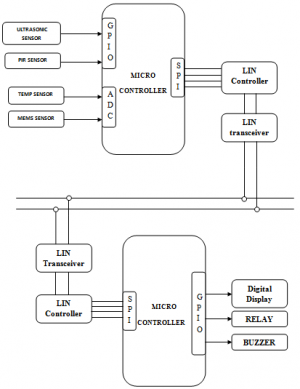
Block Diagram :
Transmitter Section :
![]()
Receiver Section :
![]()
Hardware requirements :
- ARM 7
- 9 Degree Razor IMU sensor
- UART
- Zigbee
Software Requirements :
- Keil IDE
- Flashmagic
- Matlab
- Embedded C
Applications :
- As a sensor for autonomous control of aerial vehicles like quad-rotors, helicopters, miniature airplanes.
- As a sensor for robotics platform that require to balancing
Additional information
| Weight | 1.000000 kg |
|---|

Reviews
There are no reviews yet.