

Simulation For Curved Lane Detection In Raspberry Pi
Call for Price
Simulation For Curved Lane Detection In Raspberry Pi With Opencv
Description
ABSTRACT
In any driving scenario, lane lines are an essential component of indicating traffic flow and where a vehicle should drive. It’s also a good starting point when developing a self-driving car! In this project, we will be showing you how to build your own lane detection system in OpenCV using Python. Here’s we will be using a particular structure for this pipeline. In this paper Raspberry pi is used in which OpenCV wrapper is used with python programming language where a simulation is implemented for the curved lane detection is done by using Color Filtering in HLS with Canny Edge Detection and Hough Line Detection which will be applied to the video to detect the curved lane. It’s an effective way which can used for self-driving and make the driving automation. OpenCV plays an important role in this and the lane detector can be applied to both images and the videos also.
INTRODUCTION
While driving, lane lines are an essential component of indicating traffic flow and where a vehicle should drive. It’s also a good starting point when developing a self-driving car! We have implemented a curved lane detection system that works much better, and is more robust to challenging environments. The lane detection system was written in Python using the OpenCV library.
EXISTING SYSTEM
Lane detector with image processing which can be applied to the perfect images only and where the pixel clarity also matters a lot.
PROPOSED METHOD
In this proposed system, Raspberry pi is used for the simulation of the lane detection which can easy be applied to the video with the curved lanes also with much more accuracy then the previous models.
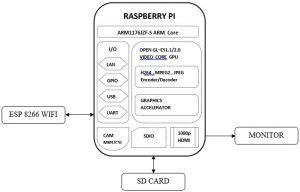
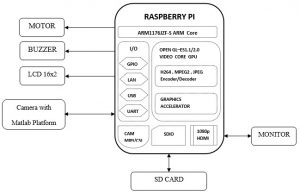
BLOCK DIAGRAM

MONITORING SECTION

BLOCK DIAGRAM DESCRIPTION
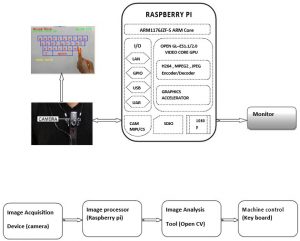
- In this project curved lane detection simulator is implemented using the OpenCV.
- Video is given as the input to the raspberry pi from which it will simulate the curved lane detection.
- Connect power supply for Raspberry pi
- Plug the HDMI cable in Raspberry pi from the monitor using VGA to HDMI converter cable
- Connect USB Mouse and USB keyboard to the Raspberry pi
HARDWARE REQUIREMENTS
- Raspberry Pi
- SD card
- Monitor
SOFTWARE REQUIREMENTS
- Raspbian Jessie
- Python
- OpenCV Wrapper
- Language – Linux
CONCLUSION
A basic curved lane detector! It works much better than the previous models, and it even handles curved lanes! However, it still does get affected by shadows and drastic changes in road texture to some extent. In future we can apply some machine learning concepts to make it much better.
REFERENCES
[1] “Image-Based Lateral Position, Steering Behavior Estimation, and Road Curvature Prediction for Motorcycles” in IEEE Robotics and Automation Letters (Volume: 3 , Issue: 3 , July 2018 )
[2] I. William Schneider, P. Savolainen, D. Moore, “Effects of horizontal curvature on single-vehicle motorcycle crashes along rural two-lane highways”, Transp. Res. Rec. J. Transp. Res. Board, vol. 2194, pp. 91-98, 2010.
[3] M. E.-H. Dabladji, D. Ichalal, H. Arioui, S. Mammar, L. Fridman, “Estimation of lateral dynamics and road curvature for two-wheeled vehicles: A HOSM observer approach”, World Congr. Int. Fed. Autom. Control, vol. 47, no. 3, pp. 2806-2811, Aug. 2014.
Additional information
| Weight | 1.000000 kg |
|---|
Reviews
There are no reviews yet.