

Self-balancing robot using Arduino
Call for Price
In this project, we are created a self-balancing robot using mems sensor. When the x-axis, y-axis, z-axis value is increasing means the robot will maintain the center of gravity
Shipping: 4 to 8 working days from the date of purchase
Package Includes:
-
Complete Hardware Kit
-
Demo Video-Embedded Below
-
Abstract
-
Reference Paper
-
PPT (20 Slides)
-
!!! Online Support !!!
Description
Abstract
In this project, we created a balancing robot using Arduino Uno. In this, we use only a two-wheeled self-balancing robot that has been designed. Normally these types of robots can be based on the physical problem of an inverted pendulum. The system in itself requires active control in order to be stable. In this project, we used Arduino Uno microcontroller and reliable angular and positional data the system can be made stable by implementing a controller. The self-balancing is designed based on the center of gravity a modern and efficient controller is the LQR – Linear Quadratic Regulator. Starting the state-space feedback controller the model has to be a good representation of reality since the output signal depends on the model. This method validation process was performed using a PID-regulator. The results showed that the model is not yet reliable. The reasons for this are discussed and recommendations for future development are listed.
Proposed System
Prepare the demonstrator for a state-space controller to be implemented, that can control the angle deviation, and position, x. This state-space description is based on a model on reality. Several assumptions and simplifications must be made. The core part of this project will be to create a model for that purpose and validate whether the model is good enough for the implementation of a state-space control, this will be done by answering the question Using a manually tuned PID-controller, what conclusions can be made regarding the reliability of the model From answering this question it can be concluded if the model is accurate enough for future state space control.
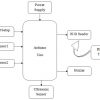
Block Diagram

Hardware Tools
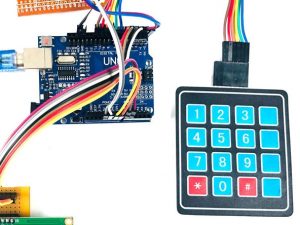
- Arduino Uno
- Mems Sensor
- Two-wheel robot setup
Software Tools
- Arduino IDE
- Embedded-C
Conclusion
Modeling based on the inverted pendulum shows that the system is unstable without a controller. A simple PID-controller can be implemented, but only to control the angle deviation. Since the demonstrator can receive angular data and position data, it is possible to get data for all the states that are required for a state-space controller. The results of the validation process demonstrate that the model is not reliable. That conclusion was made because of the big difference in settling time of the impulses between the physical demonstrator and the corresponding simulation. Reasons, why the model is not reliable, was discussed, where it was recommended that the friction of the system should be investigated more closely. All required hardware for a robot controlled via LQR is mounted on the demonstrator, so if the errors in the model are handled, the demonstrator is fully prepared for implementation. Though, if the demonstrator is supposed to handle impulses bigger than 8°, faster motors are recommended.
Additional information
| Weight | 1.000000 kg |
|---|





Reviews
There are no reviews yet.