

Robotic Hand control using Flex sensor Glove with Raspberry Pi
Call for Price
Robotic Hand control using Flex sensor Glove with Raspberry Pi
Description
ABSTRACT
In every period, Robotics are performing their best role in reducing human efforts, So that the same Robotic is done using Raspberry Pi using Glove type which contains Flex sensors to control the Robotic Arm. Flex sensors are used to have converging or released the palm that to control any applications. Not only the Robotic arm, but it can also be modified for any applications. Flex sensor can be read by connecting Analog to Digital converter to the Raspberry Pi so that we need 5 flex sensors for each finger and also to control any type of applications.
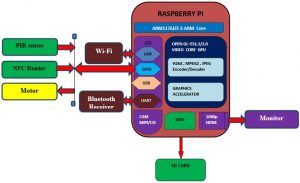
BLOCK DIAGRAM

BLOCK DIAGRAM DESCRIPTION
In the above Block diagram 5 Flex sensors are connected to the Raspberry Pi through Analog to Digital Converter, and based on closing our palm robotic arm can be controlled. The robotic arm which contains 5 fingers which get opened and closed using a motor with the strip.
PROJECT DESCRIPTION
This Raspberry Pi project helps you to control the appliances using our palm movement, by placing 5 flex sensor in the glove wore in our hand, based on bending the flex sensor value gets varied. According to the convergence robotic arm which connected to the GPIO pins of the Raspberry Pi. The application can be anything like controlling appliances based on stretching the fingers and closing the fingers for each and every application
HARDWARE REQUIRED
- Raspberry Pi
- Power Adapter
- HDMI to VGA converter (optional, when connecting to Monitor)
- MCP3008 (ADC IC)
- L293D (Driver IC)
- 5 Flex sensor
- Glove
- Robotic Arm
- 5 DC/Servo Motor
SOFTWARE REQUIRED
- SD Card Formatter
- Win32 Disk Imager (or) Etcher
LIBRARIES USED
- Rpi.GPIO as GPIO (To access GPIO Pins of Raspberry Pi)
- Time library (For Delay functions)
CONCLUSION
By this Raspberry Pi project, you will learn how to use a flex sensor for controlling the robotic arm with 5 fingers, which the code can be easily modified based on the applications.
Additional information
| Weight | 0.000000 kg |
|---|


Reviews
There are no reviews yet.