

Raspberry PI Based Line Following Robot
Call for Price
Raspberry PI Based Line Following Robot
Description
ABSTRACT
This paper presents the development of a Line following robot with OpenCV (Open Source Computer Vision). Here a robot will be connected with the Raspberry Pi which is programmed in python language with a wrapper of OpenCV, raspberry pi will be connected to the USB camera. In this the camera will be face at a white background, and wave a black object in front of the screen. It should show the largest black blob detected with its center coordinates shown by two blue lines. In the terminal it should be outputting “Turn Left” if the image is too far to the right, or “Turn Right” if the image is too far to the left. It will print “On Track” If the line is near center, or “I don’t see the line” if nothing is detected. Now it will find the black region ROI, Select the left most or right most edge of the corresponding region then Offset this point to center the tracking point and finally Calculate the steering signal based on how far the tracking point is from the center of the ROI and it will find the center of it and accordingly it will turn and follow the line. This will make the robot moves fast and accurate.
INTRODUCTION
The idea behind this is to control the Line following robot using OpenCV, In this project Raspberry pi is used which is connected to the USB camera and it will work in such a way that first it will capture the frame then it will Define the ROI after that Identify all of the black regions in this ROI then Select the left most or right most edge of the corresponding region and Calculate the steering signal based on how far the tracking point is from the center of the ROI and accordingly will follow the line.
EXISTING SYSTEM
In the existing system, line following robot is made using the Infrared sensors which will act accordingly but as the speed of the robot increases the accuracy will reduce and sometimes misses the line.
PROPOSED SYSTEM
In this proposed system, Raspberry pi is connected with the USB camera where OpenCV is used for the line follow using the ROI which will help the robot to achieve more accuracy accordingly.
BLOCK DIAGRAM

MONITORING SYSTEM

BLOCK DIAGRAM DESCRIPTION
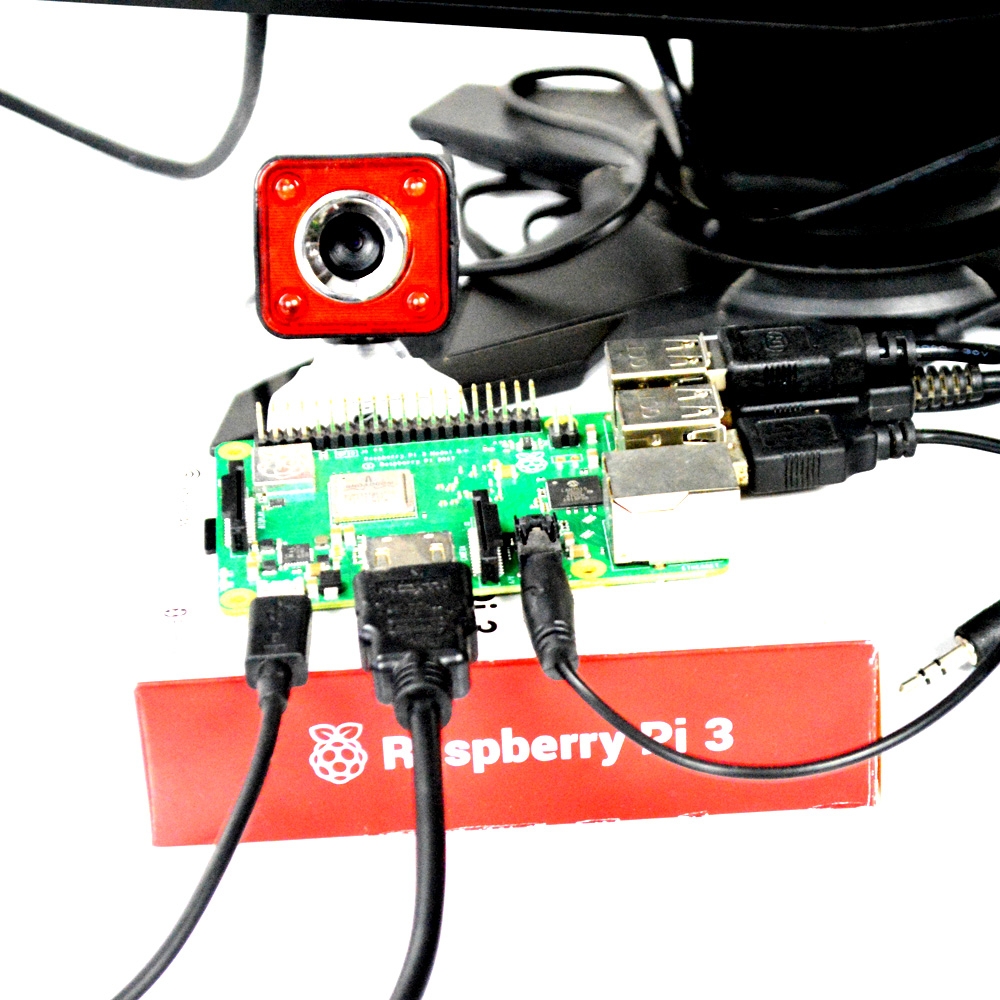
- In this project robot module with USB is connected to the Raspberry pi.
- OpenCV is used for the line following robot.
- Connect power supply for Raspberry pi
- Plug the HDMI cable in Raspberry pi from the monitor using VGA to HDMI converter cable
- Connect USB Mouse and USB keyboard to the Raspberry pi
HARDWARE REQUIREMENTS
- Raspberry Pi
- DC Motors
- L293D Driver IC
- USB Camera
- SD card
- Monitor
SOFTWARE REQUIREMENTS
- Raspbian Jessie
- Python
- OpenCV
- Language – Linux
CONCLUSION
According to this system, OpenCV make our work more easy and accurate to automate the line following robot, where in previous project we were using the infrared sensor to control the automation of the robot which will make our work hard. This project make our work more easy with the advance technology i.e. OpenCV which is more accurate.
REFERENCES
[1] “Intelligent Maze Solving Robot Based on Image Processing and Graph Theory Algorithms” in 2017 International Conference on Promising Electronic Technologies (ICPET).
[2] B. Gupta, S. Sehgal, “Survey on techniques used in autonomous maze solving robot”, Confluence the Next Generation Information Technology Summit (Confluence) 2014 5th International Conference, pp. 323-328, 2014.
[3] M. O. Aqel et al., “Estimation of image scale variations in monocular visual odometry systems”, IEEJ Transactions on Electrical and Electronic Engineering, vol. 12, no. 2, pp. 228-243, 2017.
Additional information
| Weight | 0.000000 kg |
|---|



Reviews
There are no reviews yet.