


Object Avoidance Robot Using Kinect Sensor Based Dijkstra’s Algorithm
Call for Price
Object Avoidance Robot Using Kinect Sensor Based Dijkstra’s Algorithm
Description
Abstract :
The Kinect device and rotary encoder are placed on the robot. The depth image is utilized to distinguish between obstacle and non-obstacle object. The combination between depth image and rotary encoder produce a 2D map used for robot navigation. We use Dijkstra’s algorithm for calculating the shortest way between robot positions and home position. Our system has been tested under laboratory environment. The effective distance range is 60 to 600 Cm. Our rotary encoder sensor is also successfully realized and has average error 5.05%. Our 2D map creator required 1.46 second for every creating map at one location. Also, it has 2.23% of error distance on 2D map. All experiment results show that our 2D map creator is ready for performing return to home automatically.
In this paper, we propose 2D map creator for robot navigation by replacing the use of ultrasonic sensor. Since, the existing problem of the use of ultrasonic sensor is it produces only a single depth value. Therefore, it cannot be utilized to create 2-dimensional (2D) map simultaneously. Even though an ultrasonic sensor also has an ability to scan the environment and then create 2D map, it consumes time due to single output value. In which, the main objective of our proposed system is creating 2D map automatically and simultaneously while robot is moving around.
Existing System :
- Robot navigation based on depth image
- Manual control
Proposed System :
- Microcontroller platform based
- Kinect device is used
- Can be used in more environment
- No health problems
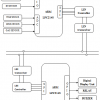
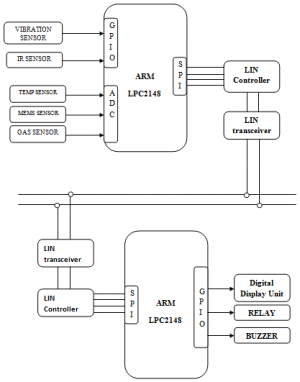
Block Diagram :
Monitoring & Robot Section :


The Kinect device is connected to Personal Computer (PC) via USB interface, after the depth image is proceed then the result is send to microcontroller We use a Kinect device as a main sensor to acquire depth image. We measure the distance between the robot and the surrounding. The map creation is processed when the robot moves around. While the robot moves around, the system acquires the depth image and converts it to 2D map which represents the distance between the obstacle and robot position. The data of distance is calculated by using the depth image and the position itself that is measured by using rotary encoder. The measurement of distance is performed by degree of view 43o for vertical and 57o for horizontal. The minimum distance that still can be acquired by the Kinect device is 2.7 inch and the maximum is 13.1 inch.
Hardware :
- Lpc2148
- Kinect
- Lcd 16×2
Software :
- Keil
- Flash magic
- Languages: embedded c
Applications :
- Indoor wireless open optical communication.
- Indoor navigation.
- Smart indoor blind assistive application.
- Vehicle to vehicle communication
Additional information
| Weight | 1.000000 kg |
|---|
Related products
-
- Out of StockRead more

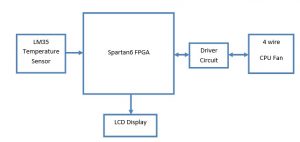
- FPGA Projects, Projects
CPU Fan speed control based on IC temperature using Spartan6 FPGA Project Kit
- Call for Price
-

-
Reviews
There are no reviews yet.