


Hand Gesture Control Robot Using Arduino
Call for Price
This paper describes the gesture control robot which can be controlled by your normal hand gesture. The accelerometer controls the movement of the car
Shipping: 4 to 8 working days from the date of purchase
Package Includes:
-
Complete Hardware Kit
-
Demo Video-Embedded Below
-
Abstract
-
Reference Paper
-
PPT (20 Slides)
-
!!! Online Support !!!
Description
Abstract
In recent years, robotics is a demanding technology in the field of science. To increases the use of robots where conditions are not certain such as security operations, robots can be made such that it will follow the instruction of human operator & execute the task. This paper describes the gesture control robot which can be controlled by your normal hand gesture. The accelerometer controls the movement of the car. Accelerometers are used to measure the angular displacement of human hand motion. It consists of mainly two parts, one is the transmitter part and another is the receiver part. The transmitter will transmit the signal according to the position of a mems sensor attached in our hand and the receiver part will receive the signal after receiving the signal the robot move in the respective directions. Here, the program is designed by using Arduino. Any robot can be controlled by using Arduino, and not only we can control it, but we can use it to do a minimum of 256 different functions.
Introduction
In this project, we have created robots based hand gesture control whether it may be any function, without human robots cannot be operated. The main purpose of using hand gestures is that it provides a more schematic way of controlling the robot and with this feature, robot can be used as a wheelchair or etc., As human hand gestures are natural, with the help of wireless communication, it is easier to interact with the robot in a more-friendly way. The robot’s movement depends upon the hand gestures. The objective of this paper is to build a wireless, hand gesture controlled a robot using an Arduino Uno, an accelerometer, and an RF transmitter and an RF receiver set. The Lilly pad microcontroller reads the analog output values of the x-axis and y-axis values of the mems sensor and converts that analog value to respective digital value. The values are given to RF transmitter the transmitter will transmit the signal to the receiver. The analog values are processed by the Lilly pad microcontroller and according to the tilt of the mems sensor mounted on the hand, it sends the commands to the RF transmitter which sends the signal to the receiver and there these signals are processed by the receiver end which drives the motor to a particular direction in which we have set it to move. The robot moves forward, backward, right and left when we tilt our palm to forward, backward, right and left respectively and the robot stops when our palm is parallel to the ground.
Proposed System
The whole project is divided into two sections one is the transmitter section and the other is the receiver section. The transmitter section consists of one Lilly pad, one 3-axis mems sensor, and one RF transmitter module. The receiver section is connected with Arduino Uno the motor driver IC is controlling the two BO DC motor, two wheels. Here, two separate 5-volt power supply is applied to both sections. Finally, the Arduino Uno reads the analog output values i.e., the x-axis and y-axis values from the 3 axis accelerometer (Mems Sensor) analog value. The analog values are processed by the Lilly pad and send to the RF transmitter which is received by the Receiver and is processed at the receiver end which drives the motor to a particular direction. The robot moves forward side, backward side, right side, and left side when there is tilt in the palm of the user in forwarding, backward, right and left respectively.
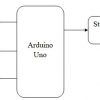
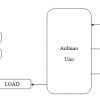
Block Diagram
Transmitter Section

Receiver Section

Hardware Tools
- Lilly pad
- Arduino Uno
- Mems Sensor
- RF Transmitter/Receiver
- Robot Setup
Software Tools
- Arduino IDE
- Embedded-C
Conclusion
In this paper, consisted of hand gesture-based car-robot. A user can control a car-robot directly by using hand gesture motions. We are using a mems sensor to control a car-robot. I also want to add more hand gestures into the interface to control the car in a more natural and effective way.
Additional information
| Weight | 1.000000 kg |
|---|
Related products
-
-
Add to cart

- Arduino Projects
Arduino based Home Automation
- ₹4,500.00 Exc Tax
-

-



Reviews
There are no reviews yet.