









Gesture Controlled Robot
Call for Price
Pantech gesture recognition kit could be used for Hand Position Tracking in three dimensions (x, y, z) and Hand Gesture Recognition based on a stochastic Hidden Markov Model (HMM).This kit is a complete solution for exploring the low-cost, high-performance MCG3130 3D Tracking and Gesture Controller based on Microchip’s GestIC® technology.Pantech gesture recognition kit also supports Microchip’s feature-rich Aurea Graphical User Interface (GUI) running on the Windows 7 Operating System, provides control of the MGC3130’s settings, making it easy to update and save parameters.
Description
Gesture Controlled Robot
This article provides information to built Gesture Controlled Robot based on Micrcohip MGC3130 Efield Technology.
Demonstration Video
Material used
☞Pantech Gesture Recognition Kit
Pantech Gesture Recognition kit Features
Pantech Gesture Recognition kit could be used for Hand Position Tracking in three dimensions (x, y, z) and Hand Gesture Recognition based on a stochastic Hidden Markov Model (HMM).This kit is a complete solution for exploring the low-cost, high-performance MCG3130 3D Tracking and Gesture Controller based on Microchip’s GestIC® technology.Pantech Gesture Recognition kit also supports Microchip’s feature-rich Aurea Graphical User Interface (GUI) running on the Windows 7 Operating System, provides control of the MGC3130’s settings, making it easy to update and save parameters.

Key Features of Gesture Recognition kit
☞MGC3130 3D Tracking and Gesture Controller
☞Built-in 7″ frame electrodes
☞Interface select
☞LED bar signalling when board is powered and indicating the communication status
☞Microchip’s PIC18F14K50 USB microcontroller passing messages between MGC3130 and the PC
☞USB mini-B connector to connect the board to a PC
☞Reset button resetting the MGC3130
☞LDO voltage regulator converting 5V USB power to 3.3V board supply
☞Supports Windows XP, Windows 7 or Windows 8 Operating system.
Specifications of Arduino Based Robo Car

Features
☞Arduino compatible
☞Support RF, Bluetooth,Wifi,GPS modules
☞Two no’s of Ultrasonic Sensor interfacing port
☞On board Light sensor (LDR)
☞On board Temperature sensor (LM35)
☞On board Buzzer for alarm.
☞20 Pin Expansion connector for external interface
☞On board Motor Driver
☞4 no’s of AA Battery for power supply
☞2 no’s of DC motor with wheel
☞Line follower module(QRD1114)
Bill of Materials to Build the Robot Car
|
Item |
Quantity |
Reference |
Part |
|
1 |
2 |
J1,J2 |
ZIGBEE PRO |
|
2 |
2 |
J3,J6 |
F-HEADER 8 |
|
3 |
2 |
J4,J5 |
F-HEADER 6 |
|
4 |
1 |
J7 |
MOTOR1 |
|
5 |
1 |
J8 |
MOTOR2 |
|
6 |
2 |
J9,J10 |
CONNNECTOR20 |
|
7 |
1 |
J11 |
PING1 |
|
8 |
1 |
J12 |
LIGHT SENSOR |
|
9 |
1 |
J13 |
BATTERY |
|
10 |
2 |
J14,J21 |
USB CONNECTOR |
|
11 |
1 |
J15 |
PING2 |
|
12 |
1 |
J16 |
TEMP SENSOR |
|
13 |
1 |
J17 |
UART SELECTION |
|
14 |
3 |
J18,J19,J22 |
HEADER 3 |
|
15 |
1 |
J20 |
BUZ |
|
16 |
1 |
LS1 |
BUZZER |
|
17 |
1 |
Q1 |
LM35 |
|
18 |
1 |
Q3 |
BC557 |
|
19 |
2 |
R1,R4 |
10K |
|
20 |
1 |
R2 |
LDR |
|
21 |
1 |
R3 |
3.3K |
|
22 |
1 |
U1 |
L293D |
|
16 |
1 |
LS1 |
BUZZER |
|
17 |
1 |
Q1 |
LM35 |
|
18 |
1 |
Q3 |
BC557 |
|
19 |
2 |
R1,R4 |
10K |
|
20 |
1 |
R2 |
LDR |
|
21 |
1 |
R3 |
3.3K |
|
22 |
1 |
U1 |
L293D |
Block Diagram
The block diagram in shows the basic building blocks for a Gesture Recognition system for the robot control. E-Field is generated by electrical charges , When the hand is waved over the Gesture Recognition kit , the filed gets distorted and is reflected by the receiver. MGC3130 processes signals into positions and gestures ,Host uses the gesture data to control the user interface.



Arduino Connection to Motor and Zigbee

Connection of Gesture Recognition kit to the Zigbee

|
S.I.NO |
HAND GESTURE INPUT |
APPLICATION OUTPUT |
|
1 |
Bottom to Top |
Front |
|
2 |
Top to Bottom |
Back |
|
3 |
Left to Right |
Right |
|
4 |
Right to Left |
Left |
|
5 |
Clockwise |
Clockwise |
|
6 |
Anticlockwise |
Anticlockwise |
Arduino Source Code for Gesture Control Robot
// Pantech Geature Recognition Project // //
https://youtu.be/cqjqGqUjRU0 // //
Powerd by Pantech Prolabs India Pvt Ltd //
#define BAUDRATE 9600 const int MotR_A = 3;
// DC Motor1 Pole_A const int MotR_B = 5;
// DC Motor1 Pole_B const int MotL_A = 6;
// DC Motor2 Pole_A const int MotL_B = 9;
// DC Motor2 Pole_B byte GetValue;
void setup()
{
Serial.begin(BAUDRATE);
pinMode(MotR_A, OUTPUT);
pinMode(MotR_B, OUTPUT);
pinMode(MotL_A, OUTPUT);
pinMode(MotL_B, OUTPUT);
}
byte ReadOneByte()
// One Byte Read Function
{
int ByteRead;
while(!Serial.available());
ByteRead = Serial.read();
return ByteRead;
}
void loop()
{
GetValue = ReadOneByte();
switch(GetValue)
{
case 'C':
Robot_Left();
break;
case 'A':
Robot_Right();
break;
case 'N':
Robot_Forword();
break;
case 'S':
Robot_Reverse();
break;
case 'E':
Robot_Left();
delay(1000);
Robot_Forword();
break;
case 'W':
Robot_Right();
delay(1000);
Robot_Forword();
break;
}
}
void Robot_Reverse()
{
digitalWrite(MotR_B, HIGH);
digitalWrite(MotR_A, LOW);
digitalWrite(MotL_A, HIGH);
digitalWrite(MotL_B, LOW);
}
void Robot_Forword()
{
digitalWrite(MotR_A, HIGH);
digitalWrite(MotR_B, LOW);
digitalWrite(MotL_B, HIGH);
digitalWrite(MotL_A, LOW);
}
void Robot_Left()
{
digitalWrite(MotR_B, HIGH);
digitalWrite(MotR_A, LOW);
digitalWrite(MotL_A, LOW);
digitalWrite(MotL_B, HIGH);
}
void Robot_Right()
{
digitalWrite(MotR_B, LOW);
digitalWrite(MotR_A, HIGH);
digitalWrite(MotL_A, HIGH);
digitalWrite(MotL_B, LOW);
}
void Robot_Stop()
{
digitalWrite(MotR_B, LOW);
digitalWrite(MotR_A, LOW);
digitalWrite(MotL_A, LOW);
digitalWrite(MotL_B, LOW);
}
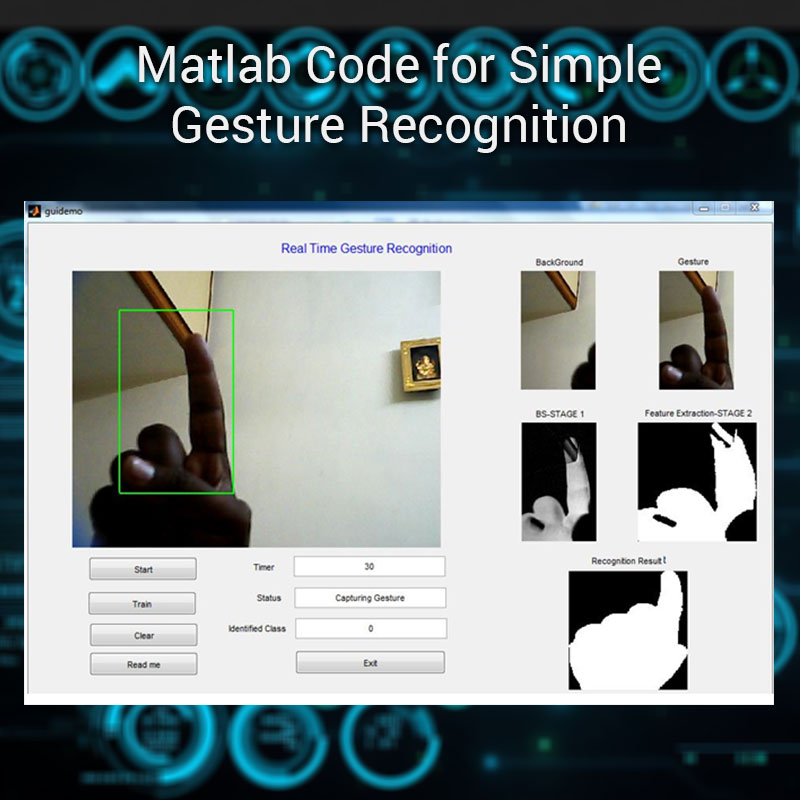
Disadvantages of the Current Gesture Recognition Based on Image Processing System
The current gesture recognition system is a vision-based system which has many disadvantages,Including
☞Need very high speed image processing (S/W, H/W)
☞Costly solution
☞Need high resolution cameras
☞Highly sensitive to noise in image processing (lens aberrations)
Advantages of Touch less Gesture Recognition
The disadvantages of the vision-based recognition system have been overcome in the touchless based Gesture Recognition system.
The advantages of the touch less sensing system are:
☞Cheaper solution
☞Easy to develop
☞Easy to maintain
☞Easy to replace
☞Easy to access
☞Touch less
Additional information
| Weight | 1.000000 kg |
|---|








Reviews
There are no reviews yet.