



Ultrasonic based dish antenna Obstacle detection using Spartan3an FPGA Starter Kit
Call for Price
This Project implements obstacle avoidance on the air when dish antenna is receiving signal from space station. The purpose of this project is to continuously receive satellite signals by sensing the interfering object and change the direction of reception.
Shipping : 4 to 8 working days from the Date of purchase
Package Includes:
-
Complete Hardware Kit
-
Demo Video-Embedded Below
-
Abstract
-
Reference Paper
-
!!! Online Support !!!
Description
Abstract
This Project implements obstacle avoidance on the air when dish antenna is receiving signal from space station. The purpose of this project is to continuously receive satellite signals by sensing the interfering object and change the direction of reception. The project was implemented with the help of Spartan3an FPGA Starter Kit, Spartan3an interfacing card with stepper motor interface and Ultrasonic Sensor.
demonstration Video
Tool required
Software:
- Xilinx ISE 11.1i
Language:
- VHDL
Hardware:
- Spartan3an FPGA Starter Kitv
- Spartan3an Add-on card
- Stepper Motor
- Ultrasonic Sensor
Block Diagram for Ultrasonic based dish antenna Obstacle detection using Spartan3an FPGA Starter Kit

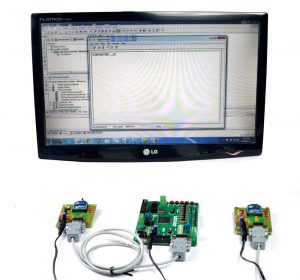
Interfacing stepper motor with Spartan3an Starter Kit
The motor is used to covert mechanical energy into electrical energy. Stepper motor is not like as any other motor which means is not rotating continuously. It is rotating step by step according to given electrical pulse. The Spartan3an FPGA Starter Kit cannot drive stepper motor directly. Because of the I/O capability of FPGA is 3.3v. So for the driver circuit are required able to drive the stepper motor. A full rotation divides into a number of equal steps. So this motor called as also stepper motor.
Stepper motor driver
The voltage capability of FPGA GPIO is only 3.3v standard logic level. So the FPGA output cannot drive the stepper motor with 3.3v. Hence the driver circuit is needed to energize the stepper motor. Here the driver circuit helps to increase the output voltage of FPGA for stepper motor that voltage often called as bus voltage. The driver controller circuit provides step and direction output as an electrical signal to the step motor. The rated voltage of driver circuit must be five to ten times of stepper motor rating voltage. Because of the driver output is related to the speed versus torque of stepper motor. Therefore if output increases, the speed of the stepper motor will increase and if the output decreases, the speed of the stepper motor will decrease. On the other hand the driver circuit current should be limited to the step motor current rating.

Ultrasonic Sensor Interface
Non Blind Zone Ultrasonic Module SDM-IO is a stable and measure the distance accurately ultrasonic module which provides 0cm – 1500mm non-contact measurement function, the ranging accuracy can reach to 3mm. Its performance can compare with SRF05/SRF02 ultrasonic distance measuring module, also it has non-blind (From 0-1cm the measurement results are not accurate when we test, but more than 1cm are accurate) design and fast response
Stepper Motor Interface with Spartan3an Starter Kit

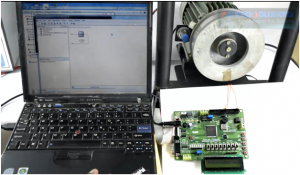
Ultrasonic based dish antenna Obstacle detection Output Image





Conclusion
The Ultrasonic Based dish antenna obstacle detection using Spartan3an FPGA Starter Kit is successfully completed using Spartan3an Starter Kit, Spartan3an Add-on card, Stepper Motor, Ultra Sonic Sensor.
Additional information
| Weight | 1.000000 kg |
|---|
Related products
-
- Out of StockRead more

- FPGA Projects, VHDL Projects
Proximity Sensor Interfacing with FPGA to measure speed of the Motor Rotation
- Call for Price
-

-

Reviews
There are no reviews yet.