

Face tracking robot using ESP-32 CAM
Call for Price
Face tracking robot using ESP-32 CAM
Description
Face tracking robot using ESP-32 CAM
The main objective of this project is to perform detection and tracking of faces from the real-time input video. The input video stream is obtained using a ESP32-CAM. The video is processed by dividing them into frames. Each frame is examined for a face. Once the face is spotted, a bounding box is drawn around it. The coordinates of the box are obtained. The first stage is executed on MATLAB software. MATLAB is a multi-archetype numerical computing programming language that uses the Viola-Jones algorithm for face detection. The coordinates obtained after detecting the face in a frame is written onto the ESP32 microcontroller. Viola-Jones algorithm is an object detection technique focusing on the faces in an image or video. It is operative only on frontal faces. The tracking of the face is done with the help of an ESP32-CAM microcontroller. The microcontroller is connected to two servo motors. The servos are centered before tracking begins. The coordinates obtained from the bounding box is used to track the face in the subsequent frames. The motors control panning and tilting the webcam mounted on it. The webcam’s position changes according to the movement of the object or person. The servo motor varies its position from 0degrees to 180 degrees. Since the Viola-Jones algorithm restricts the operation to frontal faces, the KLT algorithm is used for continuously tracking human faces in the live video stream.
Hardware used
- ESP32-CAM
- Robot Setup
Software used
- Arduino IDE
- Embedded C
- Matlab
Additional information
| Weight | 1.000000 kg |
|---|
Related products
-
- Out of StockRead more

- FPGA Projects, Projects
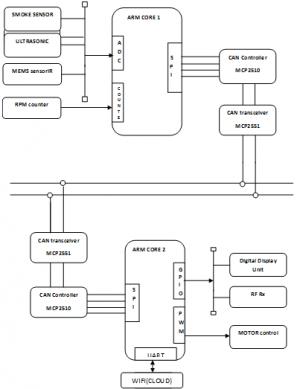
Bluetooth based RC car control using Spartan3an FPGA Project Kit
- Call for Price
-

-
-
-
Add to cart

- IoT Projects, Projects
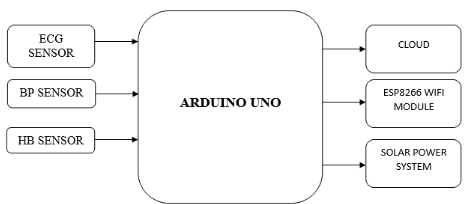
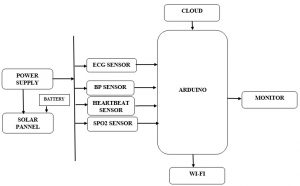
IoT based Health Monitoring System using Arduino
- ₹11,000.00 Exc Tax
-

-

-
Reviews
There are no reviews yet.