

Face tracking robot using Arduino
Call for Price
The main objective of this project is to perform detection and tracking of faces from the real-time input video with Matlab based on Arduino Uno
Shipping: 4 to 8 working days from the date of purchase
Package Includes:
-
Complete Hardware Kit
-
Demo Video-Embedded Below
-
Abstract
-
Reference Paper
-
PPT (20 Slides)
-
!!! Online Support !!!
Description
Abstract
Face tracking in real-time is required for activity recognition, automotive safety, and surveillance systems. For this Arduino is used along with the packages available in MATLAB using & nbsp, Kanade&ndash, Lucas– Tomasi (KLT) algorithm. However, due to more complex motion in real-time, a better algorithm is required. In this paper, the entire process is divided into two steps: the face is detected by the Viola-Jones detection algorithm and then the KLT algorithm is used to track the feature points in the video frame. Human faces are detected and tracked with the help of webcam and servo motors. Thus, an efficient, low cost, the lightweight programmable robot has been built.
Proposed System
The main objective of this project is to perform detection and tracking of faces from the real-time input video. The input video stream is obtained using a webcam or any other live video acquisition device. The video is processed by dividing them into frames. Each frame is examined for a face. Once the face is spotted, a bounding box is drawn around it. The coordinates of the box are obtained. The first stage is executed on MATLAB software. MATLAB is a multi-archetype numerical computing programming language that uses the Viola-Jones algorithm for face detection. The coordinates obtained after detecting the face in a frame is written onto the Arduino microcontroller. Viola-Jones algorithm is an object detection technique focusing on the faces in an image or video. It is operative only on frontal faces. The tracking of the face is done with the help of an Arduino microcontroller. Arduino is an open-source platform with both hardware and software applications. The microcontroller is connected to two servo motors. The servos are centered before tracking begins. The coordinates obtained from the bounding box is used to track the face in the subsequent frames. The motors control panning and tilting the webcam mounted on it. The webcam’s position changes according to the movement of the object or person. The servo motor varies its position from 0degrees to 180 degrees. Since the Viola-Jones algorithm restricts the operation to frontal faces, the KLT algorithm is used for continuously tracking human faces in the live video stream.
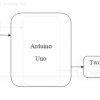
Block Diagram
![]()
Hardware Tools
- Arduino Uno
- Camera
- Robot Setup
Software Tools
- Arduino IDE
- Embedded-C
Conclusion
We have proposed a low cost, lightweight efficient robot for face detection and tracking. It is able to detect human faces until a distance of 350cm with appropriate lighting conditions. It makes use of the Viola-Jones algorithm and KLT tracker. This can be used for various applications like security and surveillance systems, drowsy driver detection systems,human-computer interaction systems, etc. We intend to add a face recognition feature to our application.
Additional information
| Weight | 1.000000 kg |
|---|
Related products
-
-
Add to cart

- Arduino Projects
Arduino based Home Automation
- ₹4,500.00 Exc Tax
-

-
-
-
Read more

- Arduino Projects
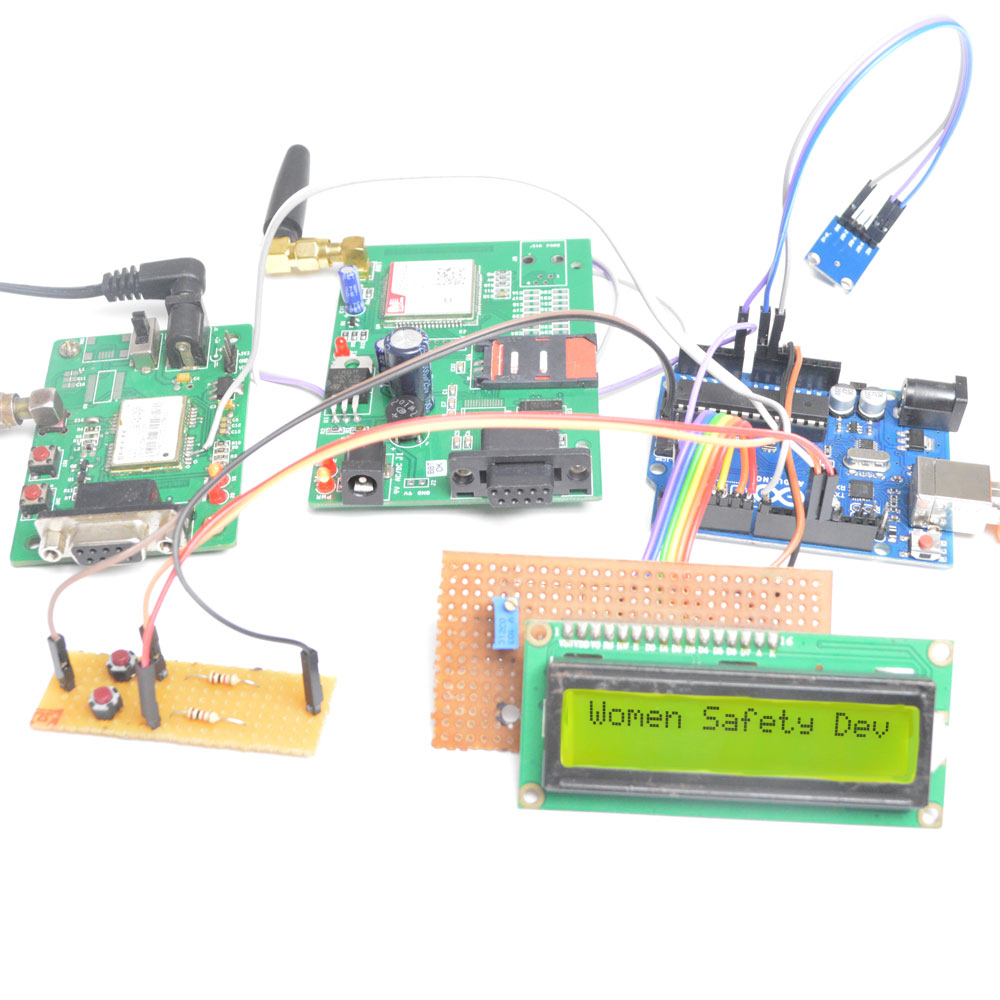
Womens_Safety using Arduino Uno
- Call for Price
-

-

-

-
-
-



Reviews
There are no reviews yet.