



Brain controlled wheel chair
Call for Price
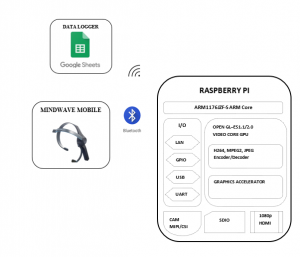
In this project, we plan to design a BCI system both hardware and software which helps the patient to navigate the wheelchair from one place to another based on eye blink which was detected by using EEG signals of the brain. This allows the user to control the direction for four
movements left turn, right turn, forward and backward movement, of the simulation or real wheel chair. The wheel chair also learns to navigate inside the house and user can select the destination by his eye blink, user can also type the keypad by using eye blink and communicate
with the real world.
Description
ABSTRACT
Brain–computer interfaces (BCIs) or mind machine interface (MMI) is the direct communication path between brain and external devices. Currently it is difficult for the persons suffering from stokes, amyotrophic lateral sclerosis (ALS) lead to complete paralysis and cannot communicate with the real world. Therefore the BCI system may be used to improve the quality of life of such patients. In this paper we overcome this challenge by introducing a BCI system which helps the patient to navigate the wheelchair from one place to another based on motor imagery model to control a brain actuated wheelchair. This allows the user to control the direction for four movements left turn, right turn, forward and backward movement, of the simulation or real wheel chair. The wheel chair also learns to navigate inside the house and user can select the destination by his eye blink. Experimental trials are to be conducted to assess the BCI Control, both a simulated wheelchair in a virtual environment and a real wheelchair were tested. The system will be realised as a standalone hardware unit and will be tested in the field.
DEMONSTRATION VIDEO
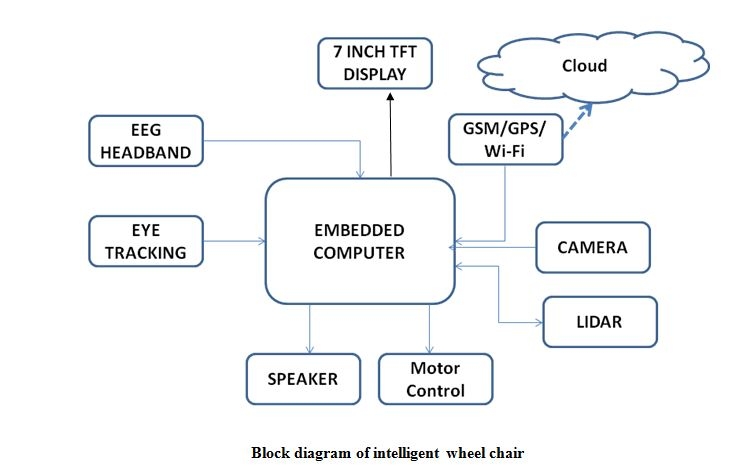
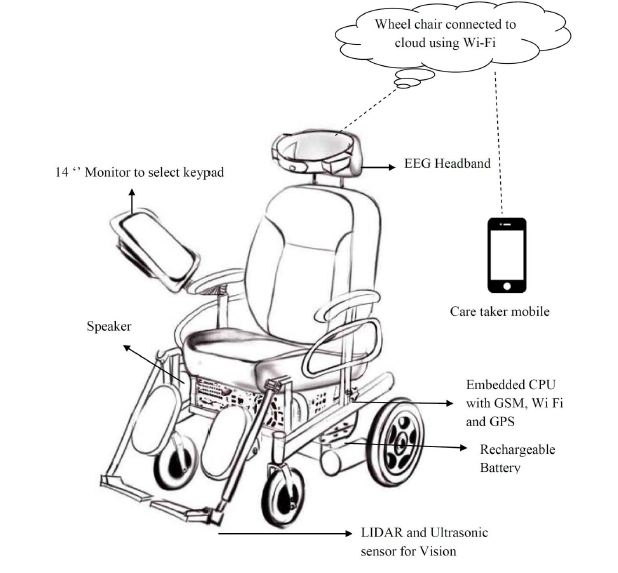
The navigation software in the Brain controlled Intelligent Autonomous Wheelchair, is in full control of the wheelchair until it reaches the selected destination. Path planning, navigation and obstacle avoidance are carried out by the navigation software using a combination of a LIDAR and ultrasonic sensors.
SPECIFICATIONS OF THE WHEEL CHAIR
- Brain or Blink controlled Direction(Blink detected using EEG)
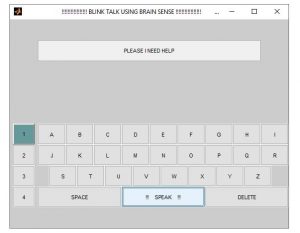
- Blink controlled Keyboards
- Text to speech Converter
- Emergency Alert using Brainwaves
- Omni directional Wheel Chair
- Lidar and Camera based Obstacle avoidance and Computer Vision
- GPS based Path learning system based on Neural Networks
- Battery operated
- Emergency Message sent to the Mobile Phones of the Care Taker
INTRODUCTION
BCI opens up a communication channel for computers to interpret brain signals for the control of devices. Electroencephalogram (EEG) based BCIs have been implemented in numerous applications such as in communication, neuroprosthetics, environmental control and robotics/mobility devices The BCI is one of the options for restoring the capability to move for those with motor disabling diseases such as Amyotrophic lateral sclerosis (ALS), brainstem stroke, brain or spinal cord injury, cerebral palsy, muscular dystrophies, and multiple sclerosis [5]. The BCI wheelchair is one of the methods to achieve this goal. Several previous studies [6-8] implemented a BCI control scheme where the subject chooses the direction of travel for the motorized wheelchair. Constant input from the subject is required to navigate the wheelchair to the desired location. Recent studies [9-11] also feature wheelchairs with built in intelligence in the wheel chair navigation system. Lopes et al. [9] included a laser rangefinder for obstacle avoidance in their wheel navigation system. System will automatically calculate a new path if there is an obstacle in the chosen trajectory of the wheelchair. A combination of sensors (laser range finder and camera) was used by Leishman et al. [10] for obstacle avoidance and path planning.
PROBLEM IDENTIFICATION AND DEFINITION
People who have severe movement disorders like Amyotrophic Lateral Sclerosis (ALS) or Locked in Syndrome, is a condition where a patient is awake and aware of its surrounding but unable to communicate or perform any action due to paralysis of almost every voluntary muscles in the body (with the exception of eye movements and blinking). The people who are suffering from severe Cerebral Palsy disorder are not able to speak or not understandable enough so they could not communicate, navigate and interact with others.ALS patients, paralyzed patients, Physically Challenged and Old age .These people also have severe movement disorder .Imagine these patients having a fullyfunctional brain trapped within a non-functioning body. This project is dedicated to them formovement, communication and emergency alert for their caretaker.
OBJECTIVES OF THE PROJECT
The primary objective of this project is to develop an intelligent low cost brain and eye controlled wheel chair with communication interface system so that user can communicate by using eye blink detected from brain waves and same can be used control the wheel chair. To achieve maximum reliability and minimum cost, wireless connectivity is to be used as far as possible. To deliver a user friendly system, it is planned to develop an Android OS or Embedded windows based human machine interface. The wheel chair and the entire system is battery powered and can be recharged and used in any Indoor area. At the end of the project the following goals will be achieved.
1)To develop EEG Based Blink detection for control of wheel chair
2)To develop a user interface keyboard where the user can select the keys and type using his Blink to communicate with his care taker
3)To design a text to speech converter so whatever keys typed can be sent to a speaker or an SMS to the care taker.
4)To develop an Emergency Alert using Brainwaves
5)To design and develop an Omni directional Wheel Chair capable of recharging and handling a payload of 120 Kg.
6)To develop Lidar and Camera based Obstacle avoidance and Computer Vision system for smooth navigation of the wheel chair.
7)GPS based Path learning system based on Neural Networks It should be noted that the main objective of the project is intended to evaluate the ability of individuals to voluntarily control the wheel chair through their brain and eye activity, being necessary to ensure that the orders are executed properly. The overall objective is to build a relatively inexpensive, easily deployable intelligent wheel chair where user can control and communicate using this hardware.
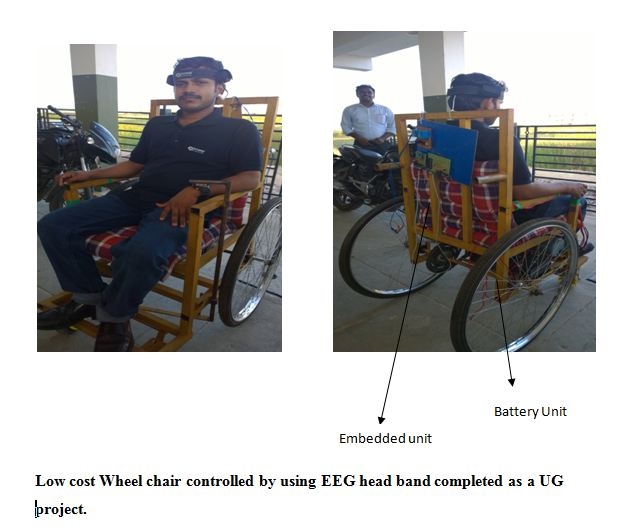
Work done so far in our LAB
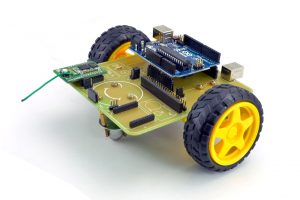
Front, Back, movement of a wheel chair has been done, Basic Single channel EEG headset was developed for acquisition of brainwave .we need further fund to fine tune the hardware and make it as complete product for manufacturing.
Bundle Contents
- Brain Sense
- Arduino
- Robot Model | Motors | Bluetooth Module
- Source Code – Matlab | Arduino
Arduino code for Brain controlled wheel chair
#define BAUDRATE 9600
const int MotR_A = 3;
const int MotR_B = 5;
const int MotL_A = 6;
const int MotL_B = 9;
byte GetValue;
void setup()
{
Serial.begin(BAUDRATE);
pinMode(MotR_A, OUTPUT);
pinMode(MotR_B, OUTPUT);
pinMode(MotL_A, OUTPUT);
pinMode(MotL_B, OUTPUT);
}
byte ReadOneByte() // One Byte Read Function
{
int ByteRead;
while(!Serial.available());
ByteRead = Serial.read();
return ByteRead;
}
void loop()
{
GetValue = ReadOneByte();
switch(GetValue)
{
case 'L':
Robot_Left();
delay(4000);
Robot_Stop();
break;
case 'R':
Robot_Right();
delay(4000);
Robot_Stop();
break;
case 'F':
Robot_Forword();
break;
case 'B':
Robot_Reverse();
break;
case 'G':
Robot_Forword();
break;
case 'S':
Robot_Stop();
break;
}
}
void Robot_Forword()
{
digitalWrite(MotR_A, LOW);
digitalWrite(MotR_B, HIGH);
digitalWrite(MotL_B, LOW);
digitalWrite(MotL_A, HIGH);
}
void Robot_Reverse()
{
digitalWrite(MotR_A, HIGH);
digitalWrite(MotR_B, LOW);
digitalWrite(MotL_B, HIGH);
digitalWrite(MotL_A, LOW);
}
void Robot_Right()
{
digitalWrite(MotR_A, HIGH);
digitalWrite(MotR_B, LOW);
digitalWrite(MotL_B, LOW);
digitalWrite(MotL_A, HIGH);
}
void Robot_Left()
{
digitalWrite(MotR_A, LOW);
digitalWrite(MotR_B, HIGH);
digitalWrite(MotL_B, HIGH);
digitalWrite(MotL_A, LOW);
}
void Robot_Stop()
{
digitalWrite(MotR_A, LOW);
digitalWrite(MotR_B, LOW);
digitalWrite(MotL_B, LOW);
digitalWrite(MotL_A, LOW);
}
Additional information
| Weight | 1.000000 kg |
|---|






Reviews
There are no reviews yet.