

Lane Detection using OpenCV, Python
₹5,000.00 Exc Tax
A Lane Detection Algorithm Based On Reliable Lane Markings
Platform : Python
Delivery Duration : 3-4 working Days
100 in stock
Description
ABSTRACT
An effective local feature extraction algorithm for lane detection is proposed in this paper. First, a lane region of interest (ROI) is determined by the location of road surface appeared in an image. Then, the light intensity and width of lane markings are taken as the local feature. A local threshold segmentation algorithm is utilized to extract lane-marking candidates followed by a morphological operation to obtain the accurate lane. An edge refining procedure is used to eliminate the interference and reduce computational cost. Finally, the lane marking is detected using Hough transform with some subsidiary conditions. With the proposed method, the lane can be accurately detected in conditions of fluctuating and poor illumination, as well as the interference from reflected light can be avoided effectively. The experimental results demonstrate the efficiency of the proposed method.
OBJECTIVE
The main cause is straight line detection. So as to avoid accidents straight line detection is an important component of intelligent transportation systems. This paper describes different lane marking algorithms and analyses advantages and disadvantages of lane detection algorithms. The most effective technique for straight line detection with reduced logic area and memory utilization is hough transform. The comparative study shows that hough transform based lane detection algorithm is very reliable.
INTRODUCTION
Lane detection is a process that is used to locate the lane markers on the road .With the help of this lane markers presents these locations to an intelligent system. This system decreases the road accidents and also helps to improves traffic conditions. Lane detection consists of specific types of primitives such as road markings etc. lane detection represents the margins of path into a single framework. It supports various applications like lane departure warning, lane keeping assists, lane centering etc. Lane departure warning gives us a warning when the vehicle is veering off the lane without signaling. Lane detection also plays an important role in advanced driver assistant system. This system helps the drivers in the driving process. This system is developed for safety and better driving. This system based upon vehicle to vehicle or vehicle to infrastructure system etc. Advanced driver assistance system consists of collision avoidance system, blind spot system and many more systems. In lane detection there are many approaches that are applied like feature based and model based. Feature based approach are used to detect edges and model based approach is a type of curve model
EXISTING METHOD
- Hsv and Lab
- Support vector machine
- Glcm
DRAWBACKS
In poor illumination scenes, lane markings are unobvious and noises may appear on the image. Moreover, vehicle headlights, tail lights, road lamps and reflected light appear in scenes and will disturb the detection result.
PROPOSED METHOD
- Median Local Thresholding
- Morphological filters
- Region of Interest
- Lane marking extraction algorithm
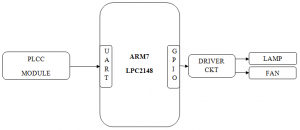
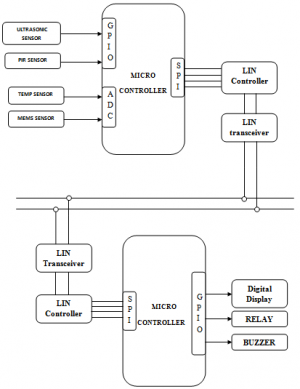
BLOCK DIAGRAM

APPLICATIONS
- Satellite communication
- Detection
- Feature matching
SOFTWARE REQUIREMENTS
- Matlab 7.14 above versions or opencv
RESULTS
Thus the lanes are detected using this system, by this we can reduce the accidents and we can increase the efficiency of the semi-automated cars and fully automated cars.
REFERENCES
[1] Yi, Shu-Chung, Yeong-Chin Chen, and Ching-Haur Chang. “A lane detection approach based on intelligent vision.” Computers & Electrical Engineering 42 ,23-29 (2015).
[2] Aly, H.; Basalamah, A.; Youssef, M., “LaneQuest: An accurate and energy-efficient lane detection system,” in Pervasive Computing and Communications (PerCom), 2015 IEEE International Conference on , vol., no., pp.163-171, 23-27 March 2015
[3] Beyeler, M.; Mirus, F.; Verl, A., “Vision-based robust road lane detection in urban environments,” in Robotics and Automation (ICRA), 2014 IEEE International Conference on , vol., no., pp.4920-4925, May 31 2014-June 7 2014
[4] Deusch, H.; Wiest, J.; Reuter, S.; Szczot, M.; Konrad, M.; Dietmayer, K., “A random finite set approach to multiple lane detection,” in Intelligent Transportation Systems (ITSC), 2012 15th International IEEE Conference on , vol., no., pp.270-275, 16-19 Sept. 2012
[5] Hunjae Yoo; Ukil Yang; Kwanghoon Sohn, “Gradient-Enhancing Conversion for Illumination-Robust Lane Detection,” in Intelligent Transportation Systems, IEEE Transactions on , vol.14, no.3, pp.1083-1094, Sept. 2013
[6] Chang-Hoon Kum; Dong-Chan Cho; Moon-Soo Ra; Whoi-Yul Kim, “Lane detection system with around view monitoring for intelligent vehicle,” in SoC Design Conference (ISOCC), 2013 International , vol., no., pp.215-218, 17-19 Nov. 2013
[7] Satzoda, R.K.; Trivedi, M.M., “Efficient Lane and Vehicle Detection with Integrated Synergies (ELVIS),” in Computer Vision and Pattern Recognition Workshops (CVPRW), 2014 IEEE Conference on , vol., no., pp.708-713, 23-28 June 2014
[8] Chien Tsung-Yu; Chung Sheng-Luen, “Android-based driving assistant for lane detection and departure warning,” in Control Conference (CCC), 2014 33rd Chinese , vol., no., pp.174-179, 28-30 July 2014
[9] Wu, Bing-Fei, Hao-Yu Huang, Chao-Jung Chen, Ying-Han Chen, Chia-Wei Chang, and Yen-Lin Chen. “A vision-based blind spot warning system for daytime and nighttime driver assistance.” Computers & Electrical Engineering39, no. 3 , 846-862.2013
[10] Jie Guo; Zhihua Wei; Duoqian Miao, “Lane Detection Method Based on Improved RANSAC Algorithm,” in Autonomous Decentralized Systems (ISADS), 2015 IEEE Twelfth International Symposium on , vol., no., pp.285-288, 25-27 March 2015
Related products
-
-
Add to cart

- OpenCV Projects, Projects
Motion Detection using OpenCV – Python
- ₹8,500.00 Exc Tax
-

-

-
Reviews
There are no reviews yet.